你玩过弹弓吗?
你的水平如何?
你可能想不到,
跳甲竟然也是玩弹弓的高手!
还被人类拜了师!
跳甲之名
跳甲(英文名:Flea Beetle),是隶属于鞘翅目叶甲科跳甲亚科昆虫的统称,是一种常见的小型甲虫。全球范围内,跳甲的种类超过1万种;在中国,已记录的种类达900余种。
常见跳甲

黄曲条跳甲(Phyllotreta striolata) ©阮用颖

莲草直胸跳甲(Agasicles hygrophila) ©阮用颖

缅甸跳甲(Altica birmanensis) ©阮用颖
尽管它们体型微小,通常仅几毫米长,却拥有惊人的跳跃能力,这也正是其名字的由来。跳甲仅需5毫秒左右的时间,便能弹跳到远超其体长(最高达289倍)的高度。相较之下,人类最多只能跳到约1米的高度,仅约为体长的一半,并且起跳时间需200至300毫秒!另外,跳甲可以连续跳跃30次以上而不疲劳,还能在跳跃过程中精准控制落点方向,实现成功着陆,这简直就是人类工程学的偶像!跳甲是昆虫界跳跃性能最为卓越的代表之一。
表1 跳甲等昆虫的弹跳特征比较
| 你玩过弹弓吗? 你的水平如何? 你可能想不到, 跳甲竟然也是玩弹弓的高手! 还被人类拜了师! 跳甲(英文名:Flea Beetle),是隶属于鞘翅目叶甲科跳甲亚科昆虫的统称,是一种常见的小型甲虫。全球范围内,跳甲的种类超过1万种;在中国,已记录的种类达900余种。 黄曲条跳甲(Phyllotreta striolata) ©阮用颖 莲草直胸跳甲(Agasicles hygrophila) ©阮用颖 缅甸跳甲(Altica birmanensis) ©阮用颖 尽管它们体型微小,通常仅几毫米长,却拥有惊人的跳跃能力,这也正是其名字的由来。跳甲仅需5毫秒左右的时间,便能弹跳到远超其体长(最高达289倍)的高度。相较之下,人类最多只能跳到约1米的高度,仅约为体长的一半,并且起跳时间需200至300毫秒!另外,跳甲可以连续跳跃30次以上而不疲劳,还能在跳跃过程中精准控制落点方向,实现成功着陆,这简直就是人类工程学的偶像!跳甲是昆虫界跳跃性能最为卓越的代表之一。 | 昆虫 | 起跳所需时间(约)毫秒 | 速度(约)米/秒 | 加速度(约) 米/秒2 | 功率输出(每单位质量)(约)瓦/千克 | | 跳甲 | 1.1– 7.7 | 0.7– 5.6 (最大) | 100– 3450 | 2.2× 105 (油菜蚤跳甲) | | 跳蚤 | 1–2 | 0.8– 1.9 (最大) | 960– 1600 | 6×103– 1.4× 104 | | 沫蝉 | 1–1.5 | 2.5– 4.7 (最大) | 1667– 5400 | 未知 | | 蝗虫 | 20 | 2.2– 3.1 (最大) | 100 | 450 | 表格节选及翻译自论文DOI: 10.3897/zookeys.915.38348 (注:加速度越大,说明昆虫能在越短的起跳时间内获得越快的速度,体现了它们的爆发力。但是,加速度大并不一定意味着物体的速度本身也大,例如在发射炮弹的瞬间,速度为零但加速度却很大) 跳甲卓越的跳跃能力主要归功于其股节膨大且强健的后足(跳跃足),这使得它能够实现弹射式的跳跃,从而在复杂的生态环境中迅速转向,并快速穿越各种地形。这种能力使它能够瞬间从叶片表面消失,是它躲避潜在捕食者的关键且高效的手段。 蓟跳甲(Altica cirsicola)的后足 图片修改自论文DOI: 10.3897/zookeys.915.38348 红褐球跳甲(Sphaeroderma testaceum)的后足 图片修改自论文DOI: 10.1242/jeb.140533 弹弓玩得好,首要是拥有一副精致的弹弓! 中国科学院动物研究所葛斯琴研究员团队和深圳职业技术大学阮用颖副研究员团队通过显微CT扫描、3D重建、高速摄像和解剖等技术方法,对13属的跳甲进行深入研究,发现跳甲后足(跳跃足)拥有类似弹弓的弹射结构以及功能,以极为高效的能量利用机制,能在瞬间完成从静止到高速弹射的状态切换。 黄栌跳甲跳跃(视频来源论文DOI: 10.3897/zookeys.915.38348) 一个完整的弹弓由Y形弹弓架、皮筋、皮兜和弹丸构成。在弹弓的弹射过程中,还有一个至关重要的部分——你的手臂以及扣住皮兜的手指。手臂固定住支架,手指紧紧扣住皮兜,防止其回弹,从而使弹弓的皮筋得以持续拉伸,不断积蓄能量。 跳甲的后足也具备类似的机制,堪称一副精巧的生物弹弓,如下图。 A.跳甲外形三维模型(侧视图),显示出膨大的后足股节。B.暗场显微镜下跳甲(Trachytetra obscura)的后足结构。C–H.基于显微CT扫描的黄栌胫跳甲(Asiophrida xanthospilota)后足三维重建图像:C 侧视图;D 背视图;E 侧视图(与图C相反视角);F 跳器的侧视图;G 跳器的腹视图;H 股胫关节(图片修改自论文DOI: 10.3897/zookeys.915.38348) 跳甲后足解剖结构示意图(图片修改自论文DOI:10.1007/s42235-025-00726-4) 可以清晰地观察到,跳甲后足股节内嵌有跳器,其作用类似于弹弓中的皮筋,是弹跳的关键动力来源。跳器呈带柄的卷曲叶片状,一端通过韧带与胫节相连,另一端则生长着伸肌。在伸肌和屈肌的协同作用下,跳器能够被拉伸变形,从而有效积累并储存能量。 三角片的一端连接屈肌,另一端通过韧带连接着胫节,它是整个“弹弓”的触发器,当它锁止时可以蓄力,释放时可以触发弹跳。 弹性板与三角片相邻,抵住三角片,配合三角片形成“触发器”的功能。 跳器、三角片、弹性板,以及后足股节的外壳、伸肌和屈肌、跳甲的整个身体共同组成了弹弓六件套。 跳甲的身体朝向跳跃方向,屈肌收缩拉动三角片带动胫节紧贴股节,后足弯曲,直至股胫角(股节与胫节的夹角)达到约20°的最小值,姿势接近水平。这一弯曲过程通常不超过20毫秒。 玩弹弓:你用手抓住皮兜和弹丸,将弹弓举到面前,做好准备。 2、储能阶段(共收缩期) 跳甲在约4-5毫秒内,伸肌和屈肌共同收缩,使股胫角从约20°增大至60°。在此过程中,弹性板卡住三角片,使得跳器被拉伸变形,持续累积能量。 玩弹弓:你开始用胳膊发力,向后拉皮筋。皮筋被拉长,储存的能量越来越多。此时,你的手指紧紧地扣住皮兜,防止它飞出去。 3、触发阶段(加速期) 由于张力持续增加,弹性板无法继续卡住三角片,三角片骤然从弹性板脱离,并滑出股节,储存的弹性能量瞬间释放。这导致跳甲的加速度呈爆炸式增加,在1毫秒内达到峰值,股胫角从约60°迅速伸展至130°,触发爆发式跳跃,整个过程仅持续1-2毫秒。 玩弹弓:皮筋被拉到极限,你决定发射时,你松开了扣住皮兜的手指。皮筋瞬间收缩,所有的能量在极短时间内爆发性地传递给皮兜和弹丸,弹丸将高速射出。 当股胫角达到约130°时,能量停止释放。待股胫角伸展超过约160°后,跳甲随即脱离地面;后足肌肉放松,为下一次跳跃做准备。 | 序号 | 跳甲 | 弹弓 | 功能说明 | | | 后足股节的外壳 | Y形弹弓架 | 作为整个弹射系统的主体框架和支撑结构。 | | | 跳器 | 皮筋(弹性势能来源) | 核心动力源。在弹弓中是皮筋被拉长储能。在跳甲体内,是这个特殊的跳器,在伸肌和屈肌的协同作用下,跳器被拉伸并发生形变,从而高效积累并储存能量。 | | | 伸肌和屈肌 | 你拉皮筋的胳膊 | “上弦”的动力。你的肌肉力量用来拉长皮筋。跳甲通过伸肌和屈肌“共收缩”来缓慢拉伸跳器变形,为其蓄能。 | | | 三角片 | 皮兜(包裹弹丸) | “发射托盘”。在弹弓中,皮兜包裹并推动弹丸。在跳甲中,三角片通过韧带连接着胫节,它将储存的能量传递给胫节,从而“发射”身体。 | | | 弹性板 | 你扣住皮兜的手指 | “扳机”或“保险栓”。这是最关键的一环!你的手指扣住皮兜,使其不能回弹。同样,弹性板会卡住三角片,阻止跳器立即释放能量。 | | | 跳甲的整个身体 | 弹丸 | 被弹射出去的对象。 | 跳甲的高效跳跃机制已成为科学家设计新一代机器人的重要灵感来源。 传统跳跃机器人多依赖电机、弹簧或气压系统作为动力来源,但常面临整机重量大、能量密度低、输出受限等问题,以及响应迟缓、无法连续跳跃等局限。葛斯琴团队在仿生机器人动能供给方面积极探索,基于对跳甲后足结构的深入解析及其跳跃机制的灵感启发,成功研发出一款燃烧动力驱动的跳跃机器人。一方面,采用丁烷与氧气混合燃烧,瞬间产生高温高压气体推动活塞,构成燃烧爆炸推进系统,以模拟跳甲的能量爆发模式。另一方面,通过仿生化的后足多连杆结构,将活塞的直线运动高效转化为跳跃动作,确保力传递过程无死区、无迟滞。这种设计显著提升了单位质量输出功率,能量利用率高,且能实现爆发性跳跃与平稳行走的无缝切换,极其适用于野外探测、灾难救援及星球探索等场景的小型机器人。 燃烧动力跳跃机器人(图片修改自论文DOI:10.1007/s42235-025-00726-4) 另外,对于这些场景中的小型机器人而言,如何在不平稳表面着陆仍是核心挑战。相比之下,跳甲完全无此困扰。葛斯琴团队努力于解析跳甲如何在极短时间内完成身体定向与姿态调整,最终实现平稳着陆的核心策略。 通过高速摄像机,研究者发现跳甲能在空中通过开合翅膀、调整身体姿态,实现多轴旋转(俯仰、翻滚),从而精准着陆于不同角度的表面,甚至能在翅膀闭合时仅凭身体调整成功着陆。 跳甲表现出三种不同的跳跃模式: -
无翅模式(Wingless):跳跃时不展开翅膀,身体在空中多次旋转(甚至翻滚4-5圈),但仍能调整姿态成功着陆。 -
中间模式(Intermediate):起跳时不展翅,在空中中途打开翅膀,迅速停止旋转,调整落点。 -
有翅模式(Winged):起跳时即展开翅膀,飞行平稳,几乎不旋转,直接飞向目标。 跳甲表现出三种不同的跳跃模式(图片来自论文DOI:10.1007/s00359-022-01567-w) 跳甲即使没有复杂的大脑,也能通过精巧的身体结构设计行为策略,完成令人惊叹的精确动作控制。尽管研究人员还未解析其中所有奥秘,但正在尝试将跳甲的跳跃与着陆机制应用于仿生机器人设计。例如,设计具有可变姿态调整结构的跳跃机器人,使其能在复杂地形中实现稳定着陆。 跳甲仿生机器人的研究方兴未艾。未来,我们有望目睹这样的仿生机器人:它们集跳跃、行走、飞行于一体,具备适应复杂环境的多模式运动能力;借助视觉识别与姿态调整,完成精准着陆的自主决策;其燃烧效率极优,采用更环保的可持续燃料…… 在不久的将来,我们或许就能在火星探测、废墟搜救机器人乃至日常物流机器人中,看到跳甲“跳跃智慧”的影子。 未来,我们很期待! | | | | |
| | | | |
| | | | |
| | | | |
| | | | |
表格节选及翻译自论文DOI: 10.3897/zookeys.915.38348
(注:加速度越大,说明昆虫能在越短的起跳时间内获得越快的速度,体现了它们的爆发力。但是,加速度大并不一定意味着物体的速度本身也大,例如在发射炮弹的瞬间,速度为零但加速度却很大)
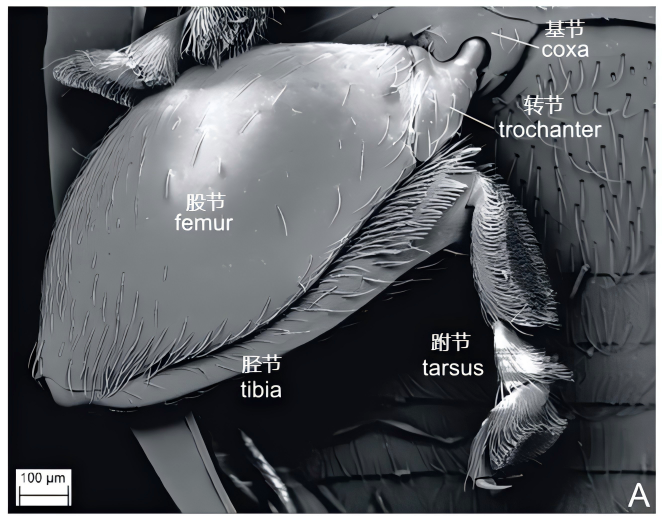
跳甲卓越的跳跃能力主要归功于其股节膨大且强健的后足(跳跃足),这使得它能够实现弹射式的跳跃,从而在复杂的生态环境中迅速转向,并快速穿越各种地形。这种能力使它能够瞬间从叶片表面消失,是它躲避潜在捕食者的关键且高效的手段。
跳甲的后足(跳跃足)
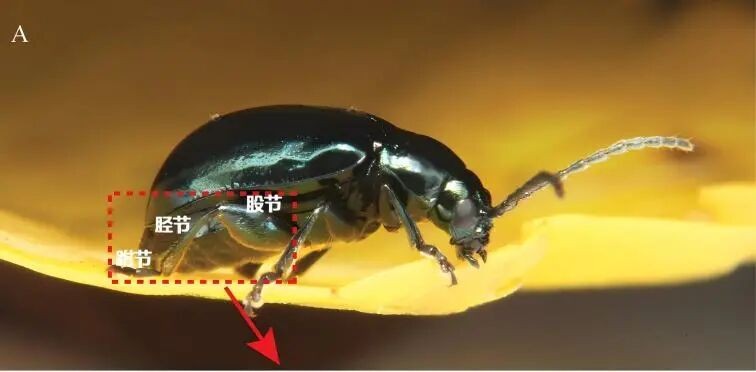
蓟跳甲(Altica cirsicola)的后足
图片修改自论文DOI: 10.3897/zookeys.915.38348
红褐球跳甲(Sphaeroderma testaceum)的后足
图片修改自论文DOI: 10.1242/jeb.140533
弹弓六件套
弹弓玩得好,首要是拥有一副精致的弹弓!
中国科学院动物研究所葛斯琴研究员团队和深圳职业技术大学阮用颖副研究员团队通过显微CT扫描、3D重建、高速摄像和解剖等技术方法,对13属的跳甲进行深入研究,发现跳甲后足(跳跃足)拥有类似弹弓的弹射结构以及功能,以极为高效的能量利用机制,能在瞬间完成从静止到高速弹射的状态切换。
,时长00:08
黄栌跳甲跳跃(视频来源论文DOI: 10.3897/zookeys.915.38348)
一个完整的弹弓由Y形弹弓架、皮筋、皮兜和弹丸构成。在弹弓的弹射过程中,还有一个至关重要的部分——你的手臂以及扣住皮兜的手指。手臂固定住支架,手指紧紧扣住皮兜,防止其回弹,从而使弹弓的皮筋得以持续拉伸,不断积蓄能量。
跳甲的后足也具备类似的机制,堪称一副精巧的生物弹弓,如下图。
跳甲的后足结构
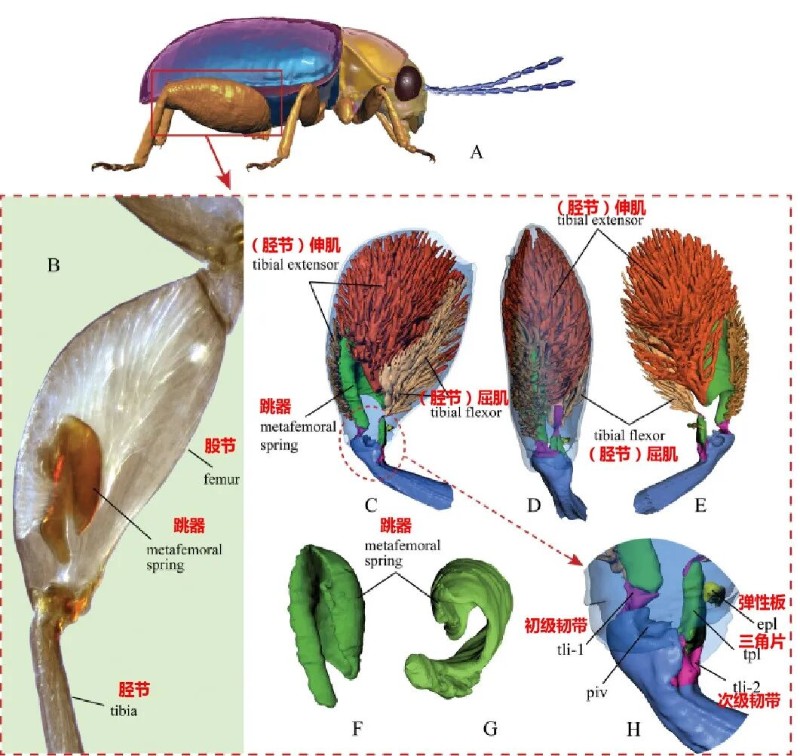
A.跳甲外形三维模型(侧视图),显示出膨大的后足股节。B.暗场显微镜下跳甲(Trachytetra obscura)的后足结构。C–H.基于显微CT扫描的黄栌胫跳甲(Asiophrida xanthospilota)后足三维重建图像:C 侧视图;D 背视图;E 侧视图(与图C相反视角);F 跳器的侧视图;G 跳器的腹视图;H 股胫关节(图片修改自论文DOI: 10.3897/zookeys.915.38348)
跳甲后足解剖结构示意图(图片修改自论文DOI:10.1007/s42235-025-00726-4)
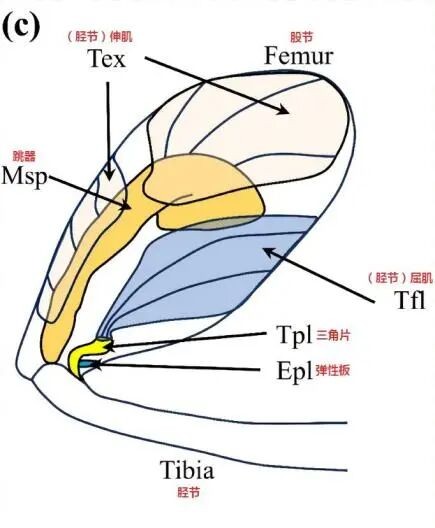
可以清晰地观察到,跳甲后足股节内嵌有跳器,其作用类似于弹弓中的皮筋,是弹跳的关键动力来源。跳器呈带柄的卷曲叶片状,一端通过韧带与胫节相连,另一端则生长着伸肌。在伸肌和屈肌的协同作用下,跳器能够被拉伸变形,从而有效积累并储存能量。
三角片的一端连接屈肌,另一端通过韧带连接着胫节,它是整个“弹弓”的触发器,当它锁止时可以蓄力,释放时可以触发弹跳。
弹性板与三角片相邻,抵住三角片,配合三角片形成“触发器”的功能。
跳器、三角片、弹性板,以及后足股节的外壳、伸肌和屈肌、跳甲的整个身体共同组成了弹弓六件套。
,时长00:25
跳甲后足弹射试验(视频来源论文DOI: 10.3897/zookeys.915.38348)
跳甲玩儿转弹弓
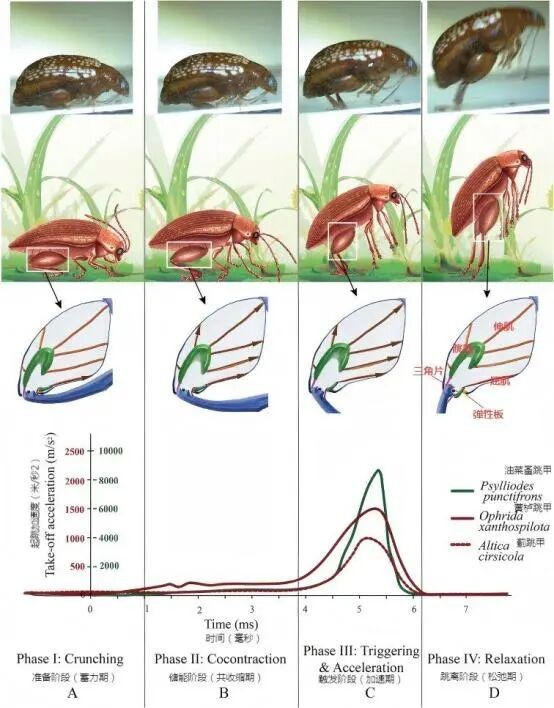
研究发现,跳甲的跳跃过程可分为四个阶段:
,时长00:24
跳甲的跳跃过程及机制模型(图片修改及视频来源论文DOI: 10.3897/zookeys.915.38348)
1、准备阶段(蓄力期)
跳甲的身体朝向跳跃方向,屈肌收缩拉动三角片带动胫节紧贴股节,后足弯曲,直至股胫角(股节与胫节的夹角)达到约20°的最小值,姿势接近水平。这一弯曲过程通常不超过20毫秒。
玩弹弓:你用手抓住皮兜和弹丸,将弹弓举到面前,做好准备。
2、储能阶段(共收缩期)
跳甲在约4-5毫秒内,伸肌和屈肌共同收缩,使股胫角从约20°增大至60°。在此过程中,弹性板卡住三角片,使得跳器被拉伸变形,持续累积能量。
玩弹弓:你开始用胳膊发力,向后拉皮筋。皮筋被拉长,储存的能量越来越多。此时,你的手指紧紧地扣住皮兜,防止它飞出去。
3、触发阶段(加速期)
由于张力持续增加,弹性板无法继续卡住三角片,三角片骤然从弹性板脱离,并滑出股节,储存的弹性能量瞬间释放。这导致跳甲的加速度呈爆炸式增加,在1毫秒内达到峰值,股胫角从约60°迅速伸展至130°,触发爆发式跳跃,整个过程仅持续1-2毫秒。
玩弹弓:皮筋被拉到极限,你决定发射时,你松开了扣住皮兜的手指。皮筋瞬间收缩,所有的能量在极短时间内爆发性地传递给皮兜和弹丸,弹丸将高速射出。
4、跳离阶段(松弛期)
当股胫角达到约130°时,能量停止释放。待股胫角伸展超过约160°后,跳甲随即脱离地面;后足肌肉放松,为下一次跳跃做准备。
玩弹弓:弹丸飞出,皮筋恢复原状,手臂肌肉放松。
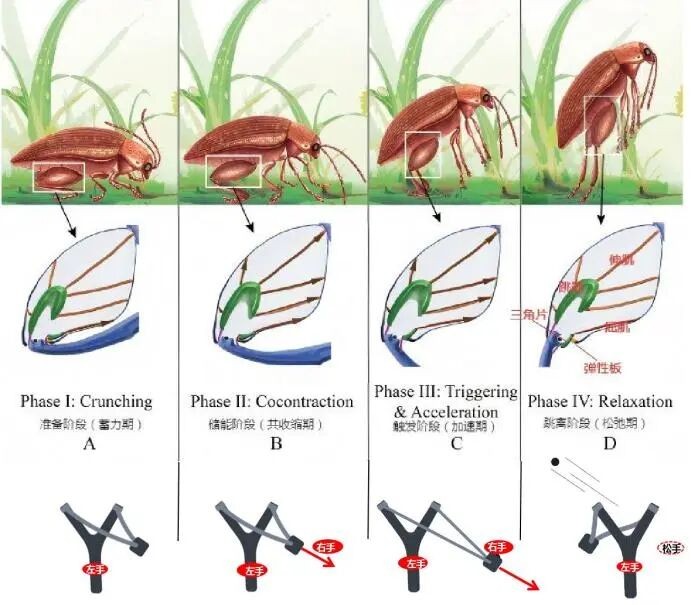
跳甲跳跃与弹弓弹射类比
表2 跳甲后足与弹弓的结构对应类比关系
| 昆虫 | 起跳所需时间(约)毫秒 | 速度(约)米/秒 | 加速度(约) 米/秒2 | 功率输出(每单位质量)(约)瓦/千克 |
| 跳甲 | 1.1– 7.7 | 0.7– 5.6 (最大) | 100– 3450 | 2.2× 105 (油菜蚤跳甲) |
| 跳蚤 | 1–2 | 0.8– 1.9 (最大) | 960– 1600 | 6×103– 1.4× 104 |
| 沫蝉 | 1–1.5 | 2.5– 4.7 (最大) | 1667– 5400 | 未知 |
| 蝗虫 | 20 | 2.2– 3.1 (最大) | 100 | 450 |
跳甲收学徒
跳甲的高效跳跃机制已成为科学家设计新一代机器人的重要灵感来源。
传统跳跃机器人多依赖电机、弹簧或气压系统作为动力来源,但常面临整机重量大、能量密度低、输出受限等问题,以及响应迟缓、无法连续跳跃等局限。葛斯琴团队在仿生机器人动能供给方面积极探索,基于对跳甲后足结构的深入解析及其跳跃机制的灵感启发,成功研发出一款燃烧动力驱动的跳跃机器人。一方面,采用丁烷与氧气混合燃烧,瞬间产生高温高压气体推动活塞,构成燃烧爆炸推进系统,以模拟跳甲的能量爆发模式。另一方面,通过仿生化的后足多连杆结构,将活塞的直线运动高效转化为跳跃动作,确保力传递过程无死区、无迟滞。这种设计显著提升了单位质量输出功率,能量利用率高,且能实现爆发性跳跃与平稳行走的无缝切换,极其适用于野外探测、灾难救援及星球探索等场景的小型机器人。
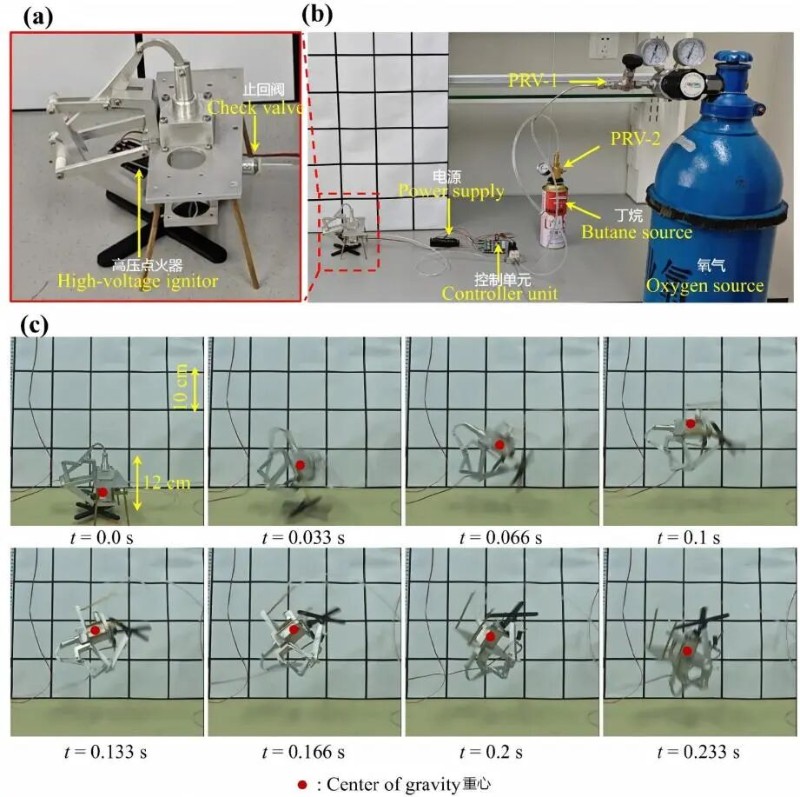
燃烧动力跳跃机器人(图片修改自论文DOI:10.1007/s42235-025-00726-4)
另外,对于这些场景中的小型机器人而言,如何在不平稳表面着陆仍是核心挑战。相比之下,跳甲完全无此困扰。葛斯琴团队努力于解析跳甲如何在极短时间内完成身体定向与姿态调整,最终实现平稳着陆的核心策略。
通过高速摄像机,研究者发现跳甲能在空中通过开合翅膀、调整身体姿态,实现多轴旋转(俯仰、翻滚),从而精准着陆于不同角度的表面,甚至能在翅膀闭合时仅凭身体调整成功着陆。
跳甲表现出三种不同的跳跃模式:
无翅模式(Wingless):跳跃时不展开翅膀,身体在空中多次旋转(甚至翻滚4-5圈),但仍能调整姿态成功着陆。
中间模式(Intermediate):起跳时不展翅,在空中中途打开翅膀,迅速停止旋转,调整落点。
有翅模式(Winged):起跳时即展开翅膀,飞行平稳,几乎不旋转,直接飞向目标。
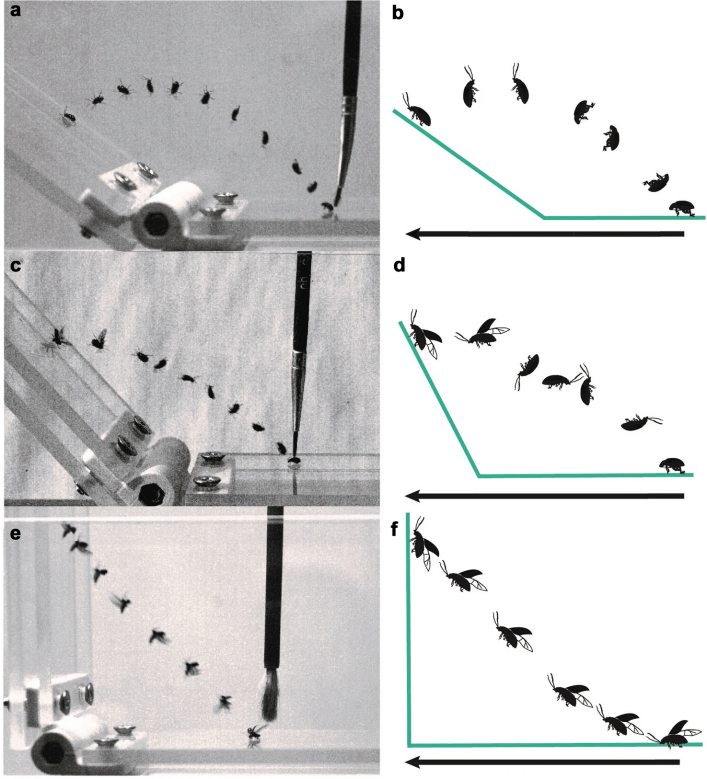
跳甲表现出三种不同的跳跃模式(图片来自论文DOI:10.1007/s00359-022-01567-w)
跳甲即使没有复杂的大脑,也能通过精巧的身体结构设计行为策略,完成令人惊叹的精确动作控制。尽管研究人员还未解析其中所有奥秘,但正在尝试将跳甲的跳跃与着陆机制应用于仿生机器人设计。例如,设计具有可变姿态调整结构的跳跃机器人,使其能在复杂地形中实现稳定着陆。
跳甲仿生机器人的研究方兴未艾。未来,我们有望目睹这样的仿生机器人:它们集跳跃、行走、飞行于一体,具备适应复杂环境的多模式运动能力;借助视觉识别与姿态调整,完成精准着陆的自主决策;其燃烧效率极优,采用更环保的可持续燃料……
在不久的将来,我们或许就能在火星探测、废墟搜救机器人乃至日常物流机器人中,看到跳甲“跳跃智慧”的影子。
未来,我们很期待!